Fast exact and approximate geodesics on meshes
ACM Trans. Graphics (SIGGRAPH), 24(3), 2005.
Efficient computation of shortest paths and distances on triangle meshes.
Abstract:
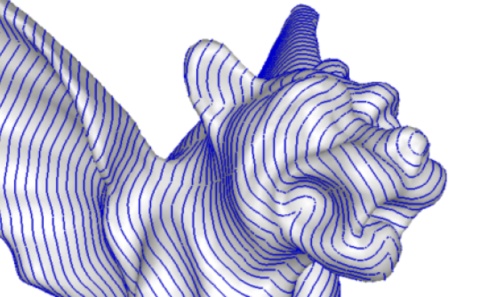
The computation of geodesic paths and distances on triangle meshes is a common operation in many computer
graphics applications. We present several practical algorithms for computing such geodesics from a source
point to one or all other points efficiently. First, we describe an implementation of the exact "single
source, all destination" algorithm presented by Mitchell, Mount, and Papadimitriou (MMP). We show that the
algorithm runs much faster in practice than suggested by worst case analysis. Next, we extend the
algorithm with a merging operation to obtain computationally efficient and accurate approximations with
bounded error. Finally, to compute the shortest path between two given points, we use a lower-bound
property of our approximate geodesic algorithm to efficiently prune the frontier of the MMP algorithm,
thereby obtaining an exact solution even more quickly.
Hindsights:
This computation of geodesic distances is used to improve the texture atlas parameterizations produced by
the DirectX UVAtlas tool.
See Bommes and Kobbelt
2007 for an interesting extension to compute geodesics from more general (non-point) sources.
See content copyrights.