Surface reconstruction from unorganized points
(Seminal Graphics Papers Vol 2.)
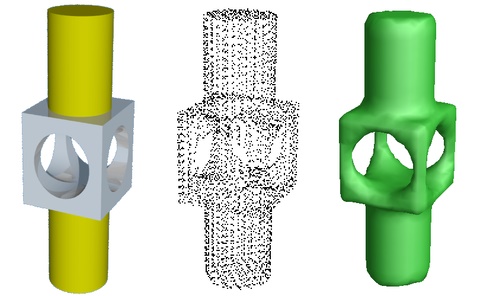
This paper addresses the difficult case where the data points have no inherent structure. This was useful for data we had obtained from the company Technical Arts, which manufactured a laser-sheet scanner mounted on a coordinate measuring machine. For traditional range images which have more structure in the data, a more specialized technique is the volumetric approach of Curless and Levoy (SIGGRAPH 1996), which also uses a signed-distance implicit function.
Our "Riemannian Graph" construction is similar to that used to estimate manifold geodesics in Isomap construction.
See also my 2006 work Poisson surface reconstruction, which assumes oriented points but achieves greater robustness using a global (yet efficient) solution.